Chirurgia vertebrale robotica - Dott. Pietro Brignardello
La chirurgia vertebrale si è rapidamente sviluppata nel corso degli anni e l'integrazione con la robotica rappresenta una sua ulteriore evoluzione.
L'utilizzo del robot permette infatti al chirurgo, nell'esecuzione degli interventi di stabilizzazione vertebrale, una estrema precisione nel posizionamento delle viti all'interno delle vertebre; questo consente di affrontare anche casi complessi dal punto di vista anatomico, limitando al massimo il rischio di malposizionamento del sistema di fissazione.
La robotica può essere utilizzata sia nella chirurgia tradizionale a
cielo aperto che nella chirurgia percutanea e mini-invasiva.
Oltre
che negli interventi di stabilizzazione vertebrale, l'utilizzo del robot
risulta utile negli interventi di vertebroplastica percutanea per il
trattamento di fratture osteoporotiche e nelle biopsie di tumori
vertebrali.
Preoperatoriamente si crea al computer sulla workstation l'intervento chirurgico in ambiente virtuale tridimensionale, pianificando tutte le fasi dell'intervento ed in particolare simulando la esatta posizione delle viti all'interno delle vertebre, la loro lunghezza e diametro, la loro angolazione. Una TAC a strati sottili preoperatoria del paziente, eseguita con un particolare software, viene quindi trasferita ed interfacciata con il planning preoperatorio sulla workstation.
Una volta in sala operatoria si monta sulla colonna vertebrale del paziente una piattaforma rigida. Vengono quindi scattate due immagini in fluoroscopia in anteroposteriore e laterale, che vengono interfacciate con le immagini ed il planning acquisito preoperatoriamente. A questo punto viene montato il robot sulla guida nella piattaforma rigida. Una volta azionato, il robot, muovendosi sulla guida, va a posizionarsi nel punto esatto di inserimento di ogni singola vite, come pianificato preoperatoriamente. Si inserisce un filo guida e attraverso di esso, mediante l'utilizzo di strumenti cannulati, si procede all'inserimento delle viti e all'esecuzione dell'intervento.
L'utilizzo della robotica oltre che, come detto precedentemente, consentire un'estrema accuratezza chirurgica diminuendo al minimo il margine di errore, permette anche una notevole diminuzione dell'impiego dei controlli radioscopici intraoperatori diminuendo l'esposizione radiologica al paziente.
 |
|
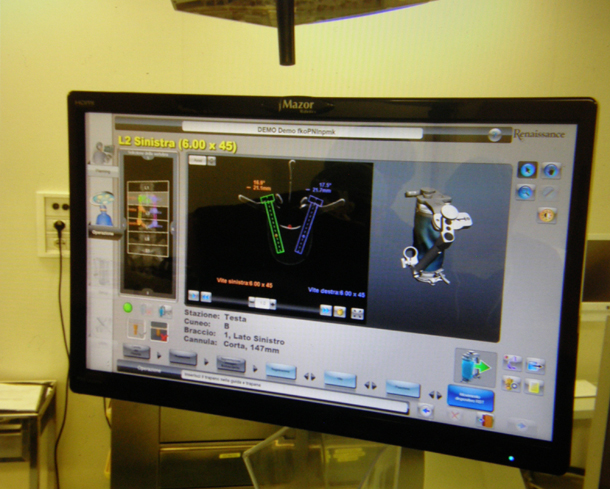
Monitor sistema robotico |
 |
|
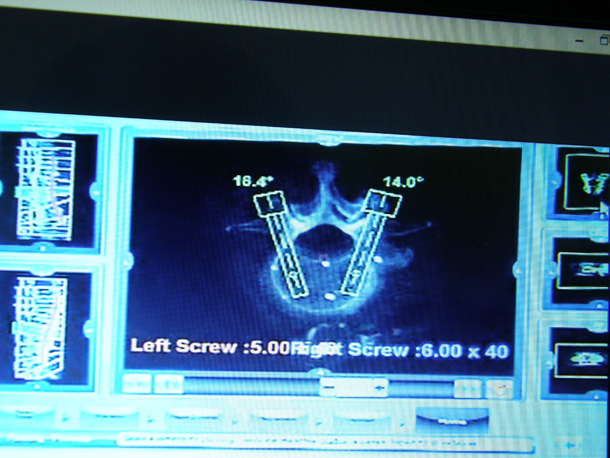
Planning preoperatorio con immagini in assiale |
 |
|
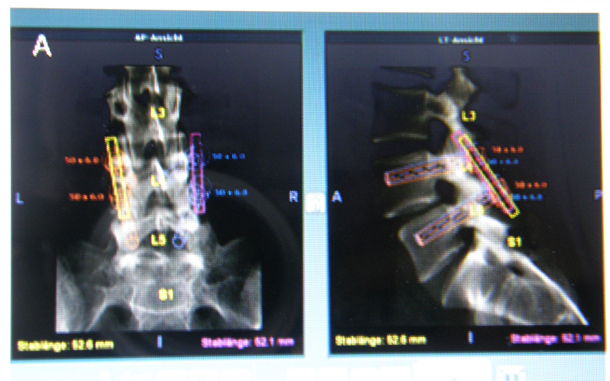
Planning preoperatorio con immagini in laterale e antero posteriore |
 |
|
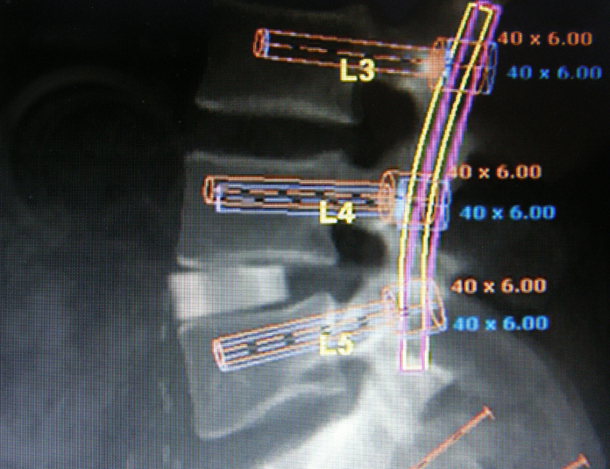
Planning preoperatorio con immagini in laterale |
 |
|
Robot posizionato sul paziente nel punto di inserimento della vite |